
Hexapods
Features Overview
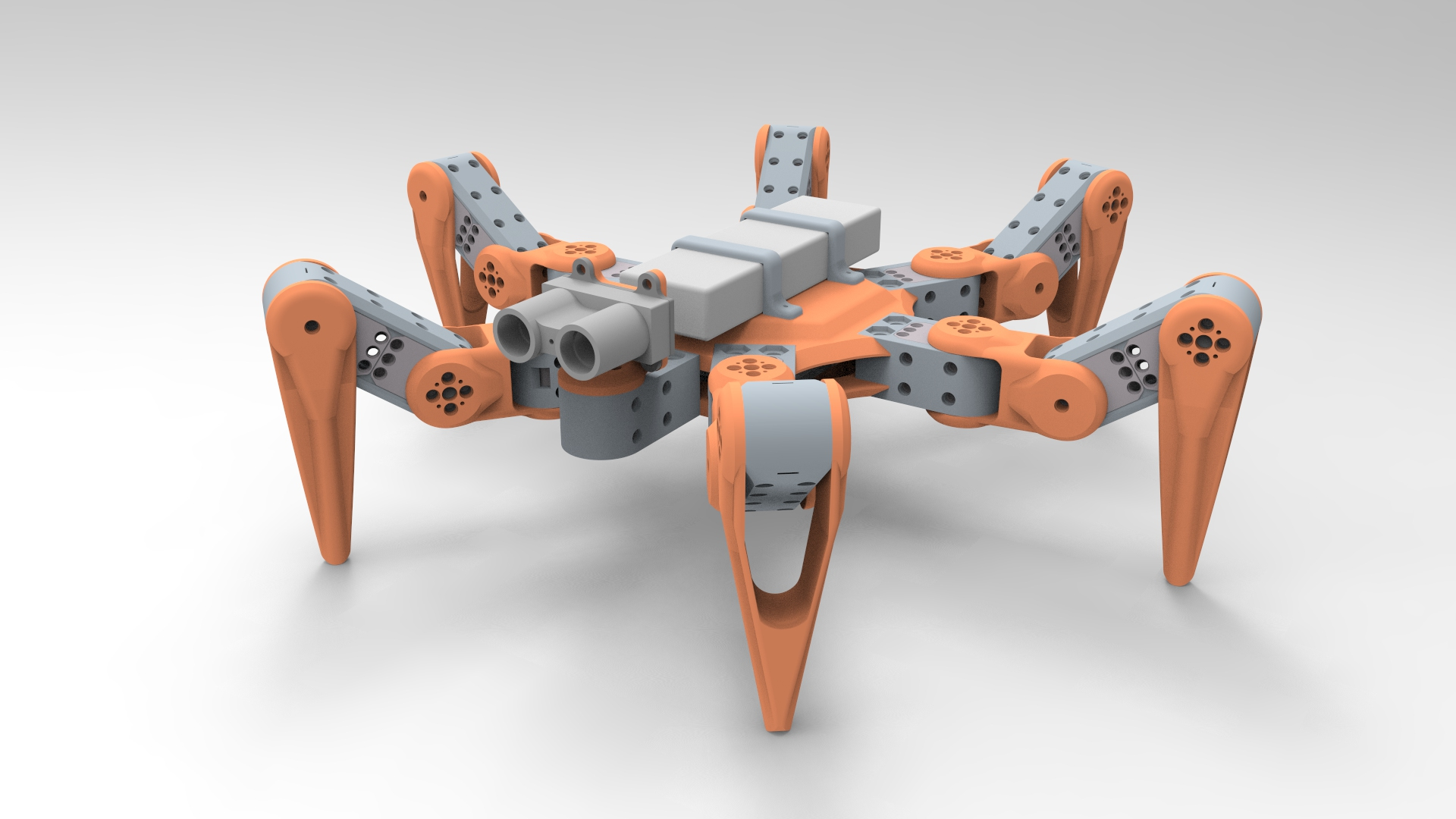
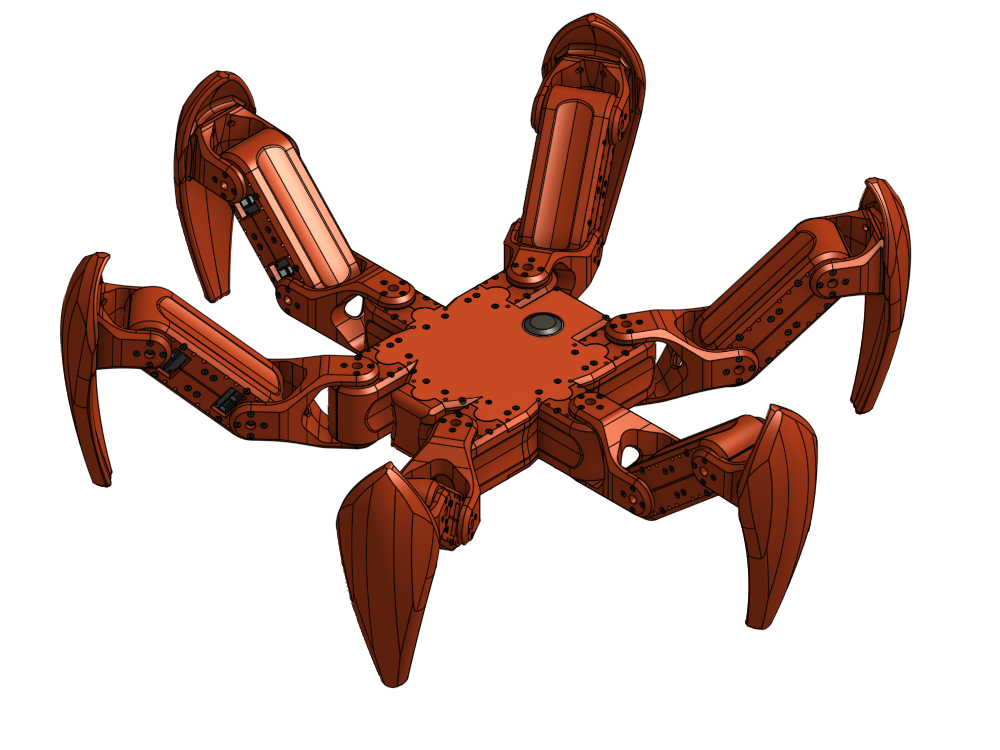
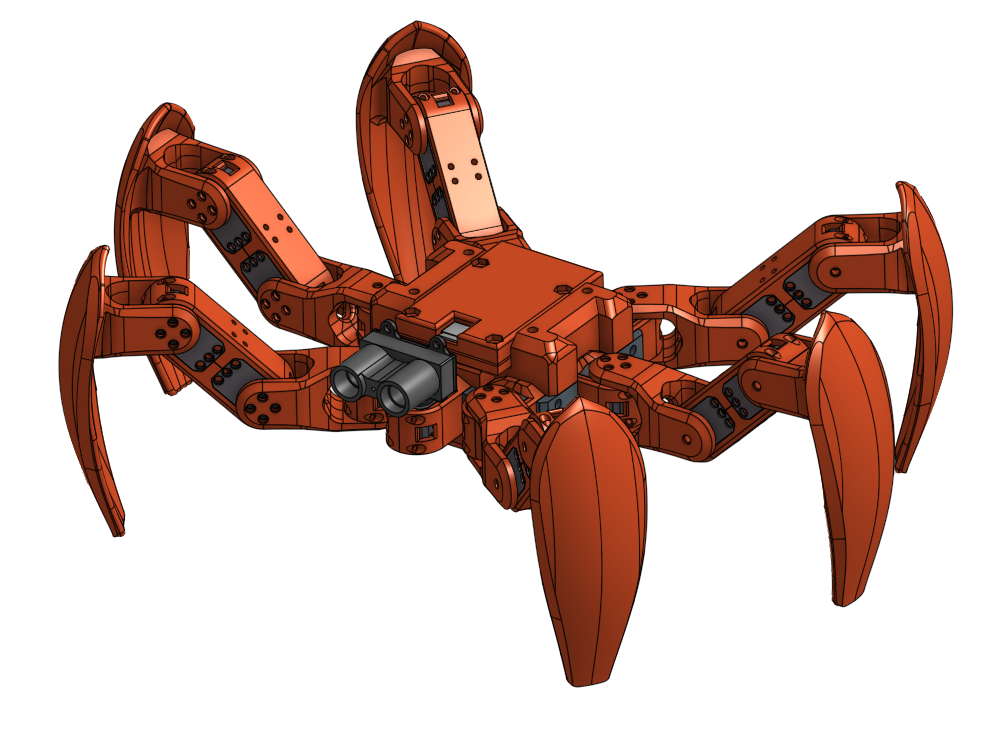
A line of six legged multi limbed robots, designed, manufactured, and programmed for use in autonomous robotic systems research. This project has spanned several years and has gone through half a dozen iterations to get at the point where it is now.
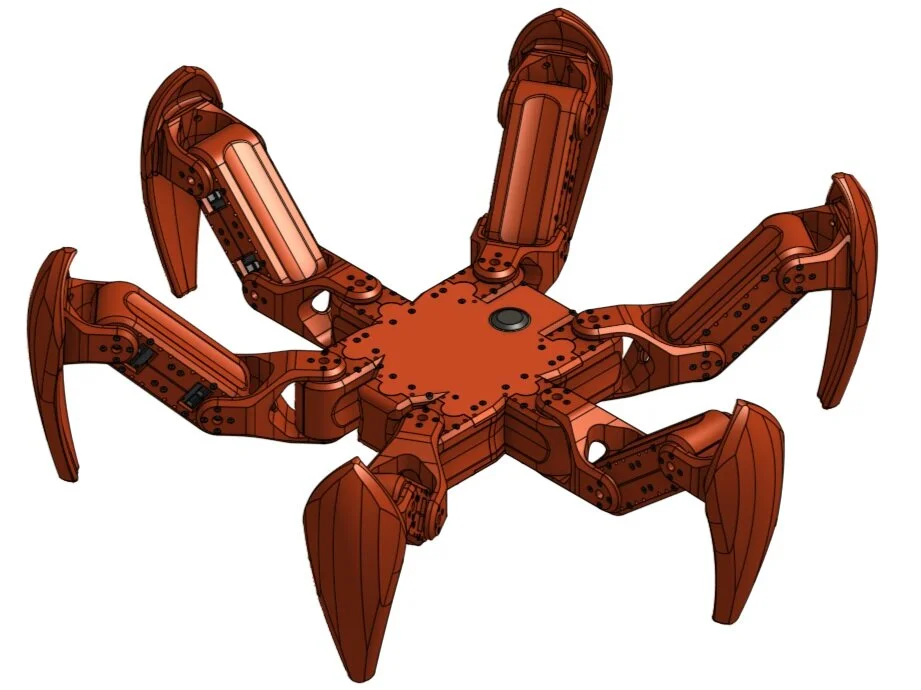
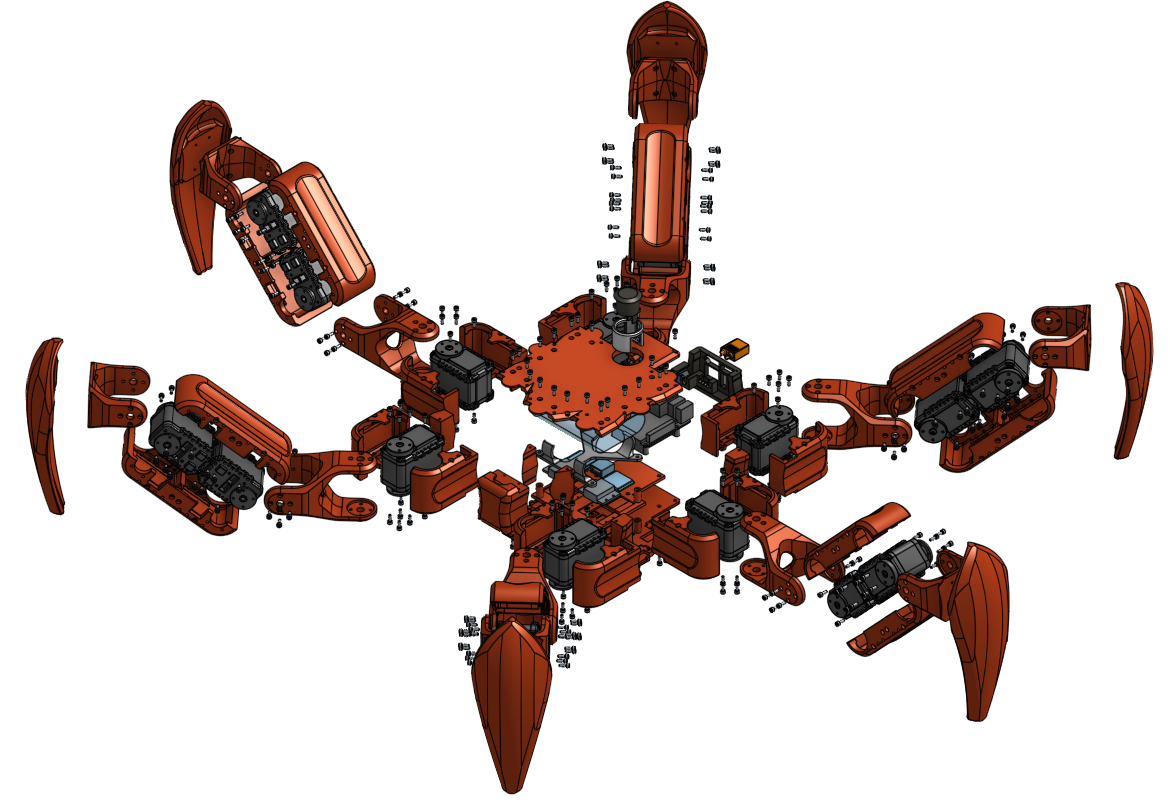
300+ parts CAD’d and manufactured.
Full stack software infrastructure including built in webserver, kinematics engine, and embedded programming.
Internal battery management system enabling a fully untethered design


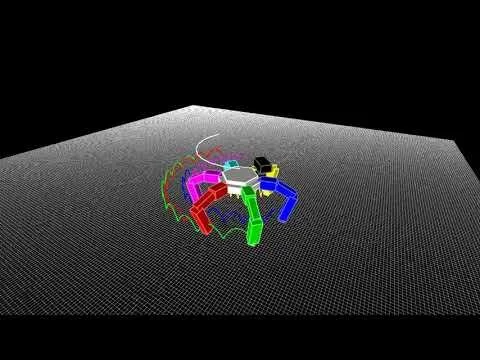
Kinematics Testing
Full forward and inverse kinematics for both body and legs. It is able to plan motions to avoid self intersection while satisfying all leg and body constraints in order to achieve the desired motion.
Load Balancing / Limiting
Servo feedback and look-ahead load prediction is used to limit motions that would induce too large of a torque around certain joints.
Load, temperature, and current velocity are all polled at ~120hz for feedback.
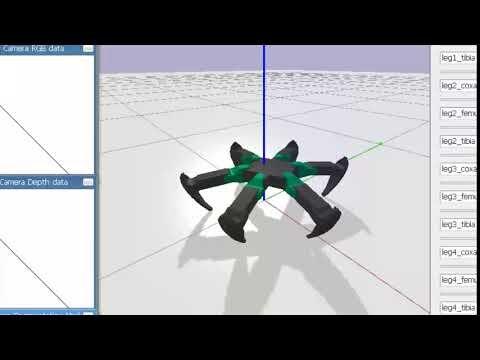
Remote control, feedback, and visualization
A flask server running locally on the hexapod is able to be accessed by any wireless device to be able to send commands and receive the robot’s status.
Similarly, an open stream of sensor and diagnostic data can be sent into a visualizer to see the state of the hexapod remotely.
Additional Images and Video